

![]()
![]()
![]()
![]()
Contact
csmitt@uni-bonn.de
Bio
I am research assistant and Ph.D. candidate at the University of Bonn, working in the Agricultural Robotics & Engineering department of the Institut für Landtechnik since January 2020.
My research sits right at the intersection of 3D computer vision and machine learning, pushing the boundaries of robotic perception in agriculture exploiting 3D neural scene understanding.
Earlier I worked developing Visual SLAM algorithms at iRobot for vacuum robots and at CNEA for inspection quadrotors. I received my Electrical Engineering Degree from Universidad Nacional de Rosario and my Master’s from Instituto Balseiro, both in Argentina.
Research Interests
- Neural Rendering
- Semantic Scene Understanding
- Agriculture Robotics
- 3D Crop Mapping
- Machine Learning
- Autonomous Navigation
Projects
PAg-NeRF: Towards fast and efficient end-to-end panoptic 3D representations for agricultural robotics
A fast and efficient model, targeted for challenging agricultural scenarios, that can render photo-realistic panoptic 3D maps from images, panoptic detections and robot odometry.

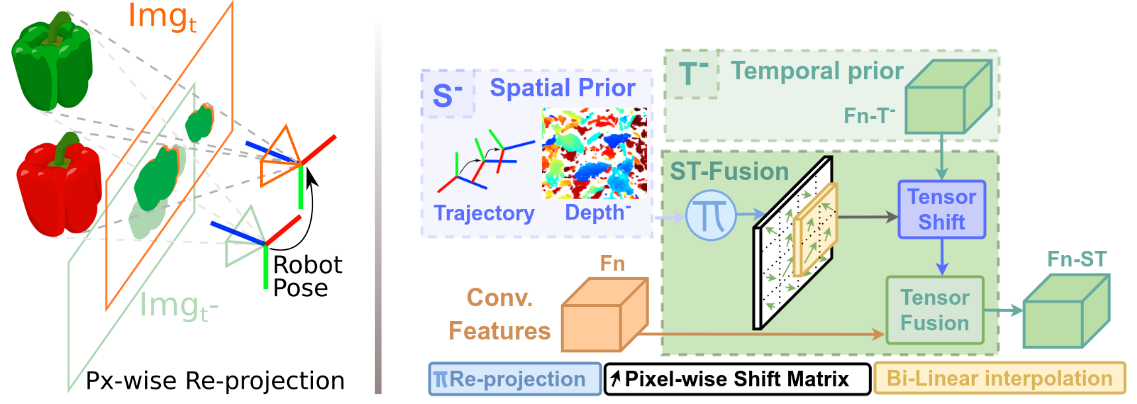
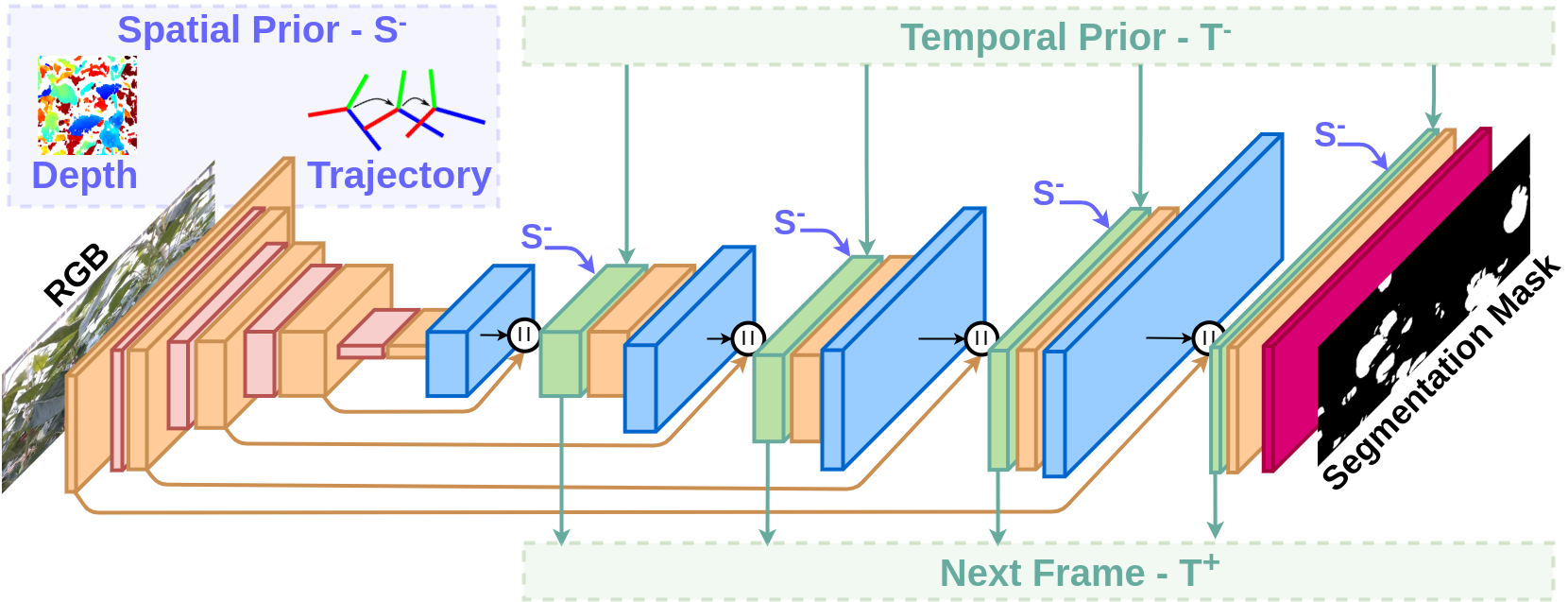
Explicitly Incorporating Spatial Information to Recurrent Networks for Agriculture
Leveraging widely available robot sensor data in agriculture to explicitly exploit Spatial-Temporal cues to improve deep neural network monitoring systems.
PATHoBot: A Robot for Glasshouse Crop Phenotyping and Intervention
Fruit/crop couting tracking and area estiamtion
Teaching:
- Python Applied to Machine Learning
- MSc Project Mobile Sensing & Robotics
- MSc Project Technology & precision Farming
Publications:
C. Smitt, M. Halstead, P. Zimmer, T. Läbe, E. Guclu, C. Stachniss, C. McCool. ”PAg-NeRF: Towards fast and efficient end-to-end panoptic 3D representations for agricultural robotics”, ArXiv pre-print arXiv:2309.05339, 2023. Project Website; Paper; Code; Data
Y. Pan, F. Magistri, T. Läbe, E. Marks, C. Smitt, C. McCool, J. Behley, C. Stachniss, ”Panoptic Mapping with Fruit Completion and Pose Estimation for Horticultural Robots”, arXiv preprint arXiv:2303.08923, 2023. Paper
C. Smitt, M. Halstead, A. Ahmadi, C. McCool, “Explicitly Incorporating Spatial Information to Recurrent Networks for Agriculture”, in IEEE Robotics and Automation Letters (RA-L), to be presented in IROS 2022, Oct. 2022. Paper; Code
M. Halstead, A. Ahmadi, C. Smitt, O. Schmittmann, C. McCool, “Crop Agnostic Monitoring Driven by Deep Learning”, Frontiers in plant science 12, Dec. 2021. Paper
T. Zaenker, C. Smitt, C. McCool, M. Bennewitz, “Viewpoint Planning for Fruit Size and Position Estimation”, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct. 2021. Paper
C. Smitt, M. Halstead, T. Zaenker, M. Bennewitz, C. McCool, “PATHoBot: A Robot for Glasshouse Crop Phenotyping and Intervention”, IEEE International Conference on Robotics and Automation (ICRA), May 2021. Paper
J. Tarrio, C. Smitt, S. Pedre. “SE-SLAM: Semi-Dense Structured Edge-Based Monocular SLAM”, ArXiv preprint, Sept. 2019. Paper
J. Tarrio, C. Smitt, S. Pedre. “Odometría Visual Monocular para Generar Mapas Navegables en Tiempo Real a Bordo de UAVs”. Proceedings of the IX Jornadas Argentinas de Robótica (JAR), Nov. 2017.
C. Smitt, C. Trujillo, J. Tarrio, S. Pedre. “Generic Embedded Drivers for Robotic Tele-Manipulator Joints”. Proceedings of the 16 Reunión de Trabajo en Procesamiento de la Información y Control (RPIC), Oct. 2015. Paper